






Vượt Qua Giới Hạn Của Lực Bám Đường
Trong lĩnh vực động học xe hơi, việc duy trì sự ổn định khi vào cua ở tốc độ cao là một thách thức lớn. Khi một chiếc xe vào cua, lực quán tính ly tâm có xu hướng đẩy xe văng ra khỏi quỹ đạo mong muốn của người lái. Hiện tượng này dẫn đến hai trạng thái mất ổn định chính:
- Thiếu lái (Understeer): Hiện tượng đầu xe có xu hướng trượt ra ngoài góc cua, khiến bán kính vào cua thực tế lớn hơn mong muốn. Thường xảy ra với xe dẫn động cầu trước.
- Thừa lái (Oversteer): Hiện tượng đuôi xe có xu hướng văng ra ngoài góc cua, khiến xe bị xoay vào trong nhiều hơn dự định. Thường xảy ra với xe dẫn động cầu sau.
Các hệ thống cân bằng điện tử (ASC/ESC) truyền thống hoạt động dựa trên nguyên lý “sửa lỗi”: khi phát hiện xe đã mất độ bám, hệ thống sẽ can thiệp bằng cách giảm công suất động cơ và phanh từng bánh xe riêng lẻ để đưa xe về trạng thái ổn định.
Tuy nhiên, triết lý của Mitsubishi là tạo ra một hệ thống chủ động ngăn chặn sự mất ổn định ngay từ đầu. Active Yaw Control (AYC) ra đời năm 1996 chính là câu trả lời. AYC không chờ xe mất kiểm soát rồi mới can thiệp, mà nó chủ động tạo ra một Mô-men quay lệch (Yaw Moment) có kiểm soát để giúp xe bám đúng theo quỹ đạo mà người lái mong muốn.

Mô-men quay lệch (Yaw Moment) là một thuật ngữ vật lý, chỉ mô-men lực làm cho một vật thể quay quanh trục thẳng đứng của nó. Với ô tô, AYC tạo ra một mô-men này để “xoay” xe một cách tinh vi, chống lại các lực vật lý gây ra hiện tượng thiếu lái hoặc thừa lái.
2. Phân Loại và Phân Tích Nguyên Lý Hoạt Động
AYC của Mitsubishi đã trải qua một quá trình tiến hóa và có thể được phân loại thành hai cơ chế hoạt động chính:
2.1. AYC Vi Sai (Differential-based Active Yaw Control)
Đây là thế hệ AYC nguyên bản và đỉnh cao nhất, một kiệt tác cơ khí được sinh ra cho đường đua và các mẫu xe hiệu suất cao.
- Lịch sử và ứng dụng: Lần đầu tiên xuất hiện trên mẫu xe huyền thoại Mitsubishi Lancer Evolution IV (1996). Sau đó, nó liên tục được cải tiến thành Super AYC trên các thế hệ Lancer Evolution tiếp theo (VII, VIII, IX, X), Galant VR-4 và Legnum VR-4.
- Cấu trúc kỹ thuật:
- Hệ thống này được tích hợp vào bộ vi sai cầu sau.
- Bên trong bộ vi sai, ngoài các bánh răng vi sai thông thường, có một cơ cấu truyền mô-men xoắn bao gồm một bộ ly hợp ướt đa đĩa (multi-plate wet clutch) và một bộ bánh răng (một tăng tốc, một giảm tốc) được điều khiển bằng thủy lực.
- Nguyên lý hoạt động:
- Thu thập dữ liệu: Bộ điều khiển điện tử (ECU) của AYC liên tục nhận tín hiệu từ các cảm biến: góc đánh lái, gia tốc ngang (G-sensor), tốc độ bánh xe, và vị trí bướm ga.
- Phân tích và tính toán: Dựa trên các dữ liệu này, ECU sẽ tính toán được mô-men quay lệch lý tưởng mà xe cần để vào cua một cách hoàn hảo.
- Hành động: ECU điều khiển các van thủy lực, tạo áp lực lên bộ ly hợp để truyền một phần mô-men xoắn từ bánh xe phía trong góc cua sang bánh xe phía ngoài.
- Khi vào cua (chống thiếu lái): Hệ thống sẽ truyền thêm mô-men xoắn đến bánh sau phía ngoài. Bánh xe này quay nhanh hơn, tạo ra một lực đẩy giúp “xoay” mũi xe vào trong góc cua một cách sắc bén hơn, triệt tiêu hiện tượng thiếu lái.
- Khi giảm tốc hoặc phanh trong cua (chống thừa lái): Hệ thống hoạt động ngược lại để giữ đuôi xe ổn định.
Phiên bản Super AYC sau này sử dụng bộ bánh răng hành tinh thay cho bánh răng côn, cho phép truyền một lượng mô-men xoắn lớn hơn và phản ứng nhanh hơn, đưa khả năng vào cua của xe lên một tầm cao mới.
2.2. AYC Dựa Trên Phanh (Brake-based Active Yaw Control)
Đây là thế hệ AYC hiện đại, được Mitsubishi tinh chỉnh và ứng dụng rộng rãi trên các dòng xe phổ thông ngày nay, kể cả xe dẫn động cầu trước (FWD).
- Lịch sử và ứng dụng: Ra mắt trên các mẫu xe thế hệ mới như Mitsubishi Xpander Cross (2023), Mitsubishi Xforce và là một thành phần trong hệ thống S-AWC của Mitsubishi Outlander.
- Cấu trúc kỹ thuật: Hệ thống này không cần một bộ vi sai cơ khí phức tạp. Thay vào đó, nó tận dụng chính hệ thống phanh ABS và hệ thống cân bằng điện tử (ASC) của xe.
- Nguyên lý hoạt động:
- Thu thập dữ liệu: Tương tự như AYC vi sai, ECU cũng thu thập dữ liệu từ cảm biến góc đánh lái, gia tốc, tốc độ bánh xe.
- Phân tích và tính toán: ECU xác định mức độ trượt và độ lệch thân xe so với ý muốn của người lái.
- Hành động: Thay vì truyền mô-men xoắn, ECU sẽ ra lệnh cho bộ điều khiển phanh tác động một lực phanh nhẹ và chính xác lên từng bánh xe cần thiết.
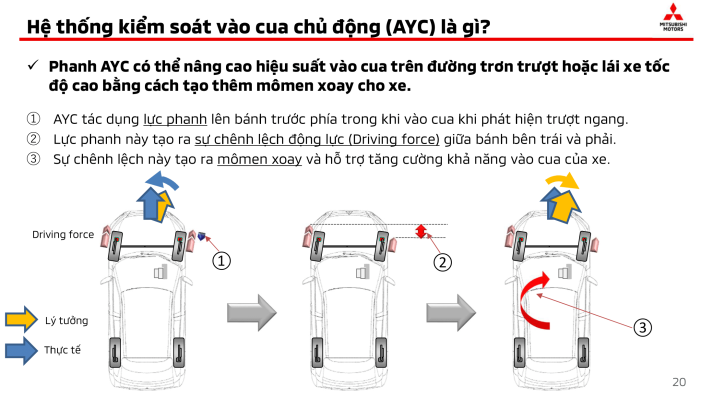
- Khi vào cua (chống thiếu lái): Hệ thống sẽ phanh nhẹ bánh xe phía trong góc cua (ví dụ, phanh bánh trước bên trái khi cua trái). Lực phanh này tạo ra một “điểm tựa xoay”, khiến xe có xu hướng quay quanh bánh xe bị phanh, từ đó giúp mũi xe hướng vào trong cua một cách gọn gàng và ổn định.
Mặc dù không chủ động cung cấp thêm lực đẩy như AYC vi sai, AYC dựa trên phanh vẫn cực kỳ hiệu quả trong việc cải thiện độ ổn định, giảm bán kính quay vòng và mang lại sự tự tin cho người lái trên các dòng xe phổ thông, đặc biệt trong điều kiện đường trơn trượt.
3. Các Dòng Xe Tiêu Biểu Của Mitsubishi Sử Dụng AYC
| Dòng Xe | Thế Hệ AYC | Ghi Chú Kỹ Thuật |
| Mitsubishi Lancer Evolution IV – X | AYC Vi sai / Super AYC | Biểu tượng của công nghệ AYC, tích hợp trong hệ thống dẫn động 4 bánh toàn thời gian (AWD) hiệu suất cao. Là hệ thống cơ khí phức tạp, chủ động truyền mô-men xoắn. |
| Mitsubishi Galant/Legnum VR-4 | AYC Vi sai | Mẫu sedan/wagon thể thao cũng được thừa hưởng công nghệ đỉnh cao này từ Lancer Evolution. |
| Mitsubishi Xforce (tất cả phiên bản) | AYC Dựa trên phanh | Trang bị tiêu chuẩn trên xe dẫn động cầu trước (FWD), hoạt động kết hợp với 4 chế độ lái, đặc biệt hiệu quả ở chế độ “Wet” (Đường trơn trượt). |
| Mitsubishi Xpander Cross (từ 2023) | AYC Dựa trên phanh | Mẫu MPV đầu tiên của Mitsubishi được trang bị AYC, giúp tăng cường đáng kể sự ổn định cho một chiếc xe có trọng tâm cao. |
| Mitsubishi Outlander | AYC Dựa trên phanh | Là một thành phần quan trọng của hệ thống kiểm soát tất cả các bánh xe (S-AWC), hoạt động phối hợp với hệ dẫn động 4WD để kiểm soát cả lực kéo và lực phanh. |
Kết Luận
Active Yaw Control (AYC) là một minh chứng cho năng lực kỹ thuật và triết lý an toàn chủ động của Mitsubishi Motors. Từ một hệ thống cơ khí phức tạp trên các mẫu xe đua đường phố, AYC đã được chuyển đổi một cách thông minh thành một giải pháp dựa trên phần mềm và hệ thống phanh, giúp công nghệ tiên tiến này trở nên dễ tiếp cận hơn trên các dòng xe phổ thông. Dù ở bất kỳ thế hệ nào, nguyên tắc cốt lõi của AYC vẫn không đổi: chủ động kiểm soát mô-men quay lệch của xe để mang lại sự ổn định, chính xác và an toàn vượt trội, cho phép người lái tự tin làm chủ tay lái trong mọi tình huống.


